
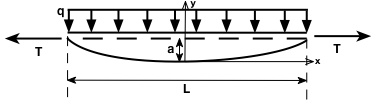
The equation describing tension drape defines a parabola:
(1) 
At  ,
, 
At  ,
, 
Thus, 
Now, for  , we can see that
, we can see that 
(2) 
So,
(3) 
From basic cable theory,
(4) 
(5) 
(6) 
which is the most basic formula for describing the cable of the main span of a suspension bridge.
This is also analagous to  , where, here
, where, here  the moment from the draped tendon at midspan.
the moment from the draped tendon at midspan.
(7) 
(8) 
(9) 
and  is the uniform distributed beam load
is the uniform distributed beam load
The  term is still indirectly included here.
term is still indirectly included here.  is
is  due to
due to  rather than the total due to as before.
rather than the total due to as before.
Note: The horizontal eccentric moment component of the tendon’s tension vector does not directly contribute to resistance, since we are analyzing the FBD of the tendon alone, and the horizontal component does nothing, directly, to resist gravity forces. This is analogous to the ‘Basic Concept Method’, where we did just the opposite: we neglected the vertical component of the tendon’s tension vector, since, in that circumstance, we were looking at flexure on the beam’s cross-section, where the vertical component has no direct affect on moment capacity.
Recall the two equations (with two unknowns) outlined at the end of the previous section. These can be written here in terms of .
(10) 
(11) 
In addition,
(12) 
So,
(13) 
(14) ![\begin{equation*} \rightarrow f'_c = f^t = \frac{-P}{A} -\left[\frac{\left(\frac{w_uL^2}{8}\right)c_t}{I_g} - \frac{Pac_t}{I_g}\right] = \frac{-P}{A} + \frac{Pac_t}{I_g} - \frac{Mc_t}{I_g} \end{equation*}](https://utsv.net/wp-content/ql-cache/quicklatex.com-5dd1d2a87e3f0c1efc0b0d82a9668edc_l3.png "Rendered by QuickLaTeX.com")
and
(15) ![\begin{equation*} 0 = f_b = \frac{-P}{A} + \left[\frac{\left(\frac{w_uL^2}{8}\right)c_b}{I_g} - \frac{Pac_b}{I_g}\right] = \frac{-P}{A} - \frac{Pac_b}{I_g} + \frac{Mc_b}{I_g} \end{equation*}](https://utsv.net/wp-content/ql-cache/quicklatex.com-c6777e4e023b1b1131c54e4f2f889c52_l3.png "Rendered by QuickLaTeX.com")
We can see that we get the same 2 equations to find our two unknowns ( and
and  ) as described in the Basic Concept Method.
) as described in the Basic Concept Method.
Thus, we can use either the Basic Concept Method or the Load-Balancing Method and we will arrive at the same solution, as expected.
However, recall also that  is an additional unknown, in practice. In fact,
is an additional unknown, in practice. In fact,  and
and  can be said to represent two additional unknowns.
can be said to represent two additional unknowns.
It turns out, though, that in the design of prestressed members, additional checks are needed at the load transfer stage, the full dead-load stage, the service load stage, as well as the limit state. Thus, there are additional equations too, which we have not yet considered.