
For completeness, we’ll derive the volume change and area change:
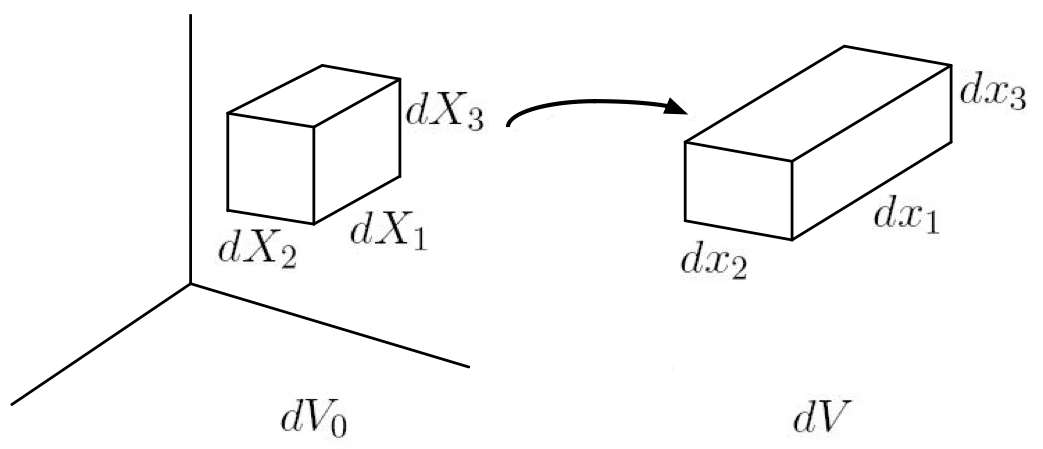
(1) 
Derivation starts from the triple scalar product. Cross products and determinants (written in tensor form) is a math topic, so we’ll skip the derivation of volumetric deformation. A quick derivation of volumetric deformation without the use of indices can be found in [Bonet].
note:
 “incompressible”
“incompressible”
Nanson’s Equation:
Now we know that  , but what about area?
, but what about area?
If  is the initial area and
is the initial area and  is the final area:
is the final area:
For small volumes, we can say that  and
and  .
.
It was previously shown that 
 and
and 

Substituting, we get 
We also know that 

(2) 
where  and
and  are the normal vectors to the surface in the respective initial and final configurations.
are the normal vectors to the surface in the respective initial and final configurations.
Eq. 2 is called Nanson’s Equation and will be useful later when we look at “true” stress versus “nominal” stress, for example.
- J. Bonet and R. Wood, Nonlinear Continuum Mechanics for Finite Element Analysis. 1997, Cambridge University Press, Cambridge.
[Bibtex]@book{Bonet, title={Nonlinear {C}ontinuum {M}echanics for {F}inite {E}lement {A}nalysis. 1997}, author={Bonet, J and Wood, RD}, publisher={Cambridge University Press, Cambridge} }