
In preparation for the constitutive formulations in later chapters, this short chapter will derive how different tensors behave under superimposed rigid body motion. This will enable us, for example, to show that  is a function of
is a function of  in the beginning of the next chapter. The idea of “work conjugate” pairs will be introduced in this chapter. We will see that the Cauchy stress tensor, , for example, changes with rigid body rotation, while
in the beginning of the next chapter. The idea of “work conjugate” pairs will be introduced in this chapter. We will see that the Cauchy stress tensor, , for example, changes with rigid body rotation, while  does not. Thus, and are not work-conjugate, and therefore it would not be appropriate to use them as a pair when forming a constitutive relationship. This was first recognized by Hill [Hill].
does not. Thus, and are not work-conjugate, and therefore it would not be appropriate to use them as a pair when forming a constitutive relationship. This was first recognized by Hill [Hill].
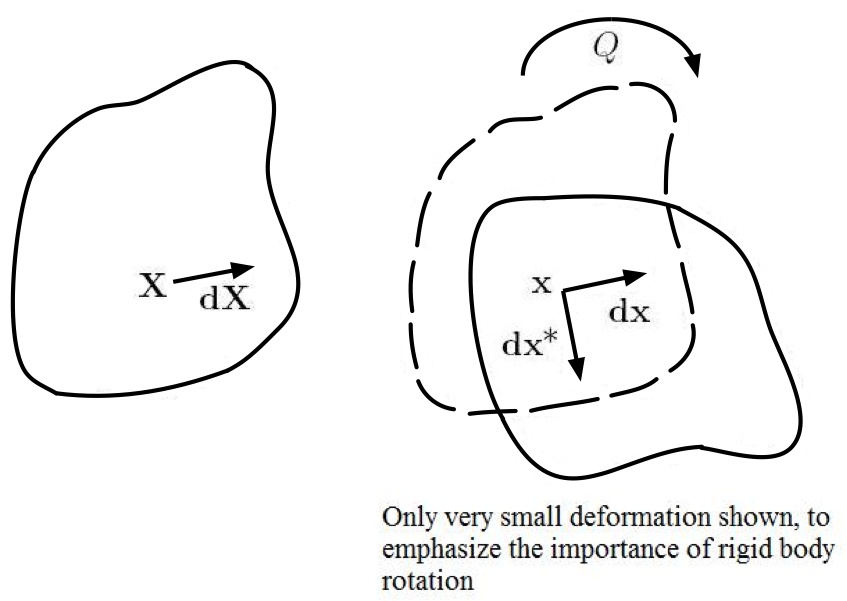
Let’s define the vector  as follows:
as follows:
 , where
, where  is a superimposed rigid body motion, sometimes called a Euclidean transformation (see Fig).
is a superimposed rigid body motion, sometimes called a Euclidean transformation (see Fig).
We know that 
What about “ ”?
”?
Consider the following square body (see Fig), paying careful attention to the heavily bolded edge in order to track the motion of the body.
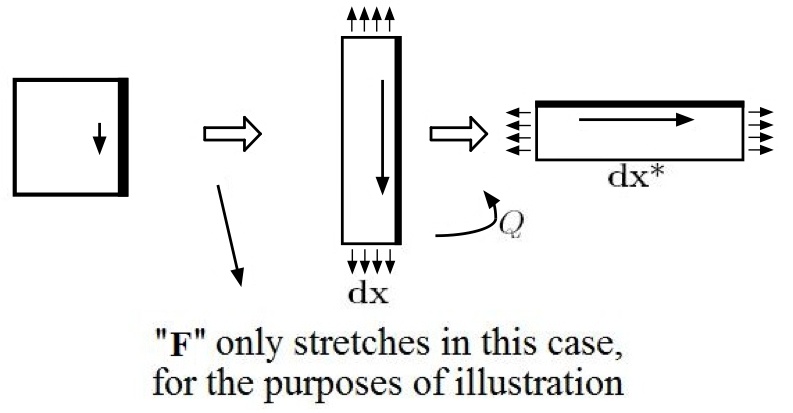
Clearly, if  (which is what we’re going to want), and, say,
(which is what we’re going to want), and, say,  ,
,
then  (this should be clear from the above Fig).
(this should be clear from the above Fig).
Since we want to find such that  , we can conclude that
, we can conclude that  .
.
What we do know is the following:
 ;
;  ;
; 
So,  , which gives:
, which gives:
(1) 
Eq. 1 is what we wanted to find, and it should be expected. Recall that  is physically understood to be a deformation (axial strains and shear),
is physically understood to be a deformation (axial strains and shear),  , followed by a rotation,
, followed by a rotation,  . Thus,
. Thus,  is the total deformation + rotation,
is the total deformation + rotation,  , followed by an explicit rigid body rotation, , – i.e. a rotation that is superimposed on
, followed by an explicit rigid body rotation, , – i.e. a rotation that is superimposed on  .
.
Now, we can see how different measures of strain and stress behave under superimposed rigid body motion, by substituting the above expression for .
(2) 
Thus,  is invariant to rigid body motion.
is invariant to rigid body motion.
note:
 always ;
always ;  since is an orthogonal tensor
since is an orthogonal tensor
note:

informal proof:
 ;
; 


or

 NOT =
NOT =  which does not match either of the above expressions for
which does not match either of the above expressions for
(or  which is similarly
which is similarly  )
)

 matches
matches  expression for
expression for
or
 matches
matches  expression for
expression for
formal proof: see Appendix A.1
(3) 
What about  ,
,  , and
, and  ?
?


Recall, 
Insert into the above expression 
So,  ;
;  ( is symmetric ; is orthogonal)
( is symmetric ; is orthogonal)
Also,  (skipped work)
(skipped work)
How about rates?

Recall also, 
So, 
note: (
 since is orthogonal)
since is orthogonal)
(4) 
note:
 is antisymmetric, and indeed, the two terms that make up are each antisymmetric
is antisymmetric, and indeed, the two terms that make up are each antisymmetric
How about stress?
Since  , we can say that
, we can say that  (1)
(1)
We also know the following three expressions to be true:
 (2)
(2)
 (3)
(3)
 (4)
(4)
(4) (1) (3)  (5)
(5)
(2) (5) ( )
)
(5) 
note: Since
 and
and  , we can say that and are a “work-conjugate pair.” A more rigorous proof, starting with the “balance of mechanical energy” can be found in [Holzapfel].
, we can say that and are a “work-conjugate pair.” A more rigorous proof, starting with the “balance of mechanical energy” can be found in [Holzapfel].
How about the nominal stress and the Second Piola-Kirchhoff Stress?

Again, we will need to use 
Since  depends on
depends on  , we will need
, we will need  . It turns out, though, that
. It turns out, though, that 
note: the determinant of an orthogonal tensor is “1”
So, 


How about  ?
?


(6) 
 is a good measure of stress when there are small (infinitesimal) strains. It will also be used as a “work-conjugate pair” with in the following chapters on constitutive relationships.
is a good measure of stress when there are small (infinitesimal) strains. It will also be used as a “work-conjugate pair” with in the following chapters on constitutive relationships.
- G. A. Holzapfel, Nonlinear Solid Mechanics: A Continuum Approach for Engineering, Baffins Lane, Chichester, West Sussex PO19 1UD, England: John Wiley & Sons Ltd., 2000.
[Bibtex]@book{holzapfel, address = {Baffins Lane, Chichester, West Sussex PO19 1UD, England}, author = {Holzapfel, Gerhard A.}, publisher = {John Wiley \& Sons Ltd.}, title = {{Nonlinear Solid Mechanics: A Continuum Approach for Engineering}}, year = {2000} } - R. Hill, “On constitutive inequalities for simple materials I,” Journal of the Mechanics and Physics of Solids, vol. 16, iss. 4, pp. 229-242, 1968.
[Bibtex]@article{Hill, title={On constitutive inequalities for simple materials I}, author={Hill, R}, journal={Journal of the Mechanics and Physics of Solids}, volume={16}, number={4}, pages={229--242}, year={1968}, publisher={Elsevier} }