
The limit state of an I-beam, subjected to strong axis bending moment, depends on many factors. It is important to know what such factors are (e.x. composite vs. noncomposite) and the various limit states permitted by code (i.e. plastic moment, inelastic local buckling, elastic lateral torsional buckling (LTB), and inelastic LTB). The following derivation is only applicable for elastic LTB, which is a limit state that will occur for a noncomposite, slender beam.
This derivation is adapted from Salmon and Johnson [Salmon].
Bending about the “ ” axis and the associated deflection,
” axis and the associated deflection,  , should be familiar from mechanics of materials. Such bending is depicted in the figure below, which shows the beam in its deformed configuration in the
, should be familiar from mechanics of materials. Such bending is depicted in the figure below, which shows the beam in its deformed configuration in the  plane (i.e. a side view). We may also recall that the slope of the beam,
plane (i.e. a side view). We may also recall that the slope of the beam,  , can be expressed in terms of the deflection,
, can be expressed in terms of the deflection,  .
.

The applied moment,  , can potentially cause an instability of the beam characterized by combined weak-axis bending, torsion, and “warping torsion.” This kind of failure is called lateral torsional buckling (LTB). To see how such a mechanism can form, let’s look at the figure below, which shows the buckled shape of the beam in the
, can potentially cause an instability of the beam characterized by combined weak-axis bending, torsion, and “warping torsion.” This kind of failure is called lateral torsional buckling (LTB). To see how such a mechanism can form, let’s look at the figure below, which shows the buckled shape of the beam in the  plane (a top view).
plane (a top view).

By drawing the strong axis moment, , as a vector (recall that the double arrow signifies the axis the moment is acting about, per the right-hand-rule), we can see that some of that strong axis moment, , is projected onto the  axis. In other words, the strong axis moment, , causes torsion,
axis. In other words, the strong axis moment, , causes torsion,  , if there is any lateral deflection,
, if there is any lateral deflection,  , present.
, present.
Now, let’s look at a cross section view of the beam (i.e. the  plane) in the buckled configuration. This is depicted in the figure below. Note that under a rotation (i.e. “angle of twist” from mechanics of materials),
plane) in the buckled configuration. This is depicted in the figure below. Note that under a rotation (i.e. “angle of twist” from mechanics of materials),  , the flange moves a distance
, the flange moves a distance  , which is NOT the same as from the previous figure.
, which is NOT the same as from the previous figure.
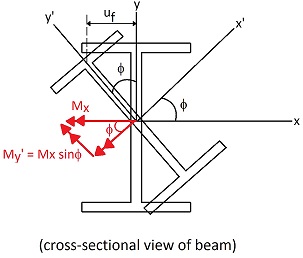
By drawing the strong axis moment, , as a vector, we can again see that some of this moment is projected onto another axis. This time, the axis that is projected onto is the  axis. Physically, this beams that the strong axis moment, , causes a weak axis moment,
axis. Physically, this beams that the strong axis moment, , causes a weak axis moment,  if there is any twist, , present.
if there is any twist, , present.
Thus, we can see that even though the only applied moment is a strong axis moment, , this moment can potentially cause a weak axis moment,  , as well as a torsion,
, as well as a torsion,  . This will only occur if becomes large enough to overcome the beam’s internal resistance to weak-axis bending and torsion, which depend on its material and geometric properties
. This will only occur if becomes large enough to overcome the beam’s internal resistance to weak-axis bending and torsion, which depend on its material and geometric properties  ,
,  ,
,  ,
,  ,
,  , etc.
, etc.
Hence, this failure mechanism is aptly named lateral-torsional-buckling. In particular, we note that this is indeed a buckling problem, so we expect the governing equation to be a differential equation, similar to Euler buckling for a column subjected to compression (see Euler buckling).
The external moment tends to make the beam want to buckle (LTB), while the internal resistance to bending and twist tend to keep the beam straight. The beam will remain straight (where “straight,” here, means bending only in the plane) until the external moments equal the internal resistive moments.
INTERNAL RESISTANCE TO TORSION AND “WARPING TORSION”
(skipping work here … see section 8.5 in Salmon and Johnson [Salmon])
(1) 
In eq. 1,  is the torsional term, which should be familiar from mechanics of materials.
is the torsional term, which should be familiar from mechanics of materials.  is the “warping torsion” term, which is essentially the bending of the compression flange perpendicular to the load.
is the “warping torsion” term, which is essentially the bending of the compression flange perpendicular to the load.  is a geometric property that can be found in Table 1-1 in the AISC Steel Manual, for a given I-shape.
is a geometric property that can be found in Table 1-1 in the AISC Steel Manual, for a given I-shape.
Also note that solving this differential equation will eventually result in a sine function. Thus, the two terms on the RHS of eq. 1 will end up being opposite sign. The minus sign in eq. 1 will ensure that the terms are indeed additive, resulting in , which is of greater magnitude than either or .
EXTERNAL TWISTING MOMENT
The actual external moment is , but we recall that if there is some deflection present perpendicular to the load (“” in the “top view” figure), then some fraction of will be projected onto the axis, causing .
(2) 
We can see in eq. 2 that is a small fraction of the external applied moment, . There is NOT any actual applied torsion.
So, substituting eq. 2 into eq. 1, we get:
(3) 
Differentiating eq. 3 with respect to z:
(4) 
Eq. 4 is a result of us equating internal and eternal twist. However, we want on the LHS of eq. 4, rather than . So, let’s do the same thing for the weak axis moment (i.e. equate internal and external moments).
INTERNAL RESISTANCE TO WEAK AXIS BENDING
We know from mechanics of materials:
(5) 
ENTERNAL WEAK AXIS BENDING MOMENT
is our actual applied moment. However, if there is some twist, , present (see previous cross-sectional view), then some fraction of is projected onto the axis, causing .
(6) 
As we can see in eq. 6 that is some small fraction of the applied moment . There are NOT any applied horizontal forces or applied weak axis moments.
So, substituting eq. 6 into eq. 5, we get:
(7) 
Eq. 7 is the result of equating internal and external weak axis bending.
Finally, substituting eq. 7 into eq. 4:
(8) 
Eq. 8 is the governing differential equation for LTB.
SOLUTION
Solving this differential equation and using “torsion-restrained” boundary conditions:
(skipping work … see Salmon and Johnson section 9.3 for complete derivation)

where
 and
and  ;
; 
 trivial solution
trivial solution


 is the first mode, so
is the first mode, so 
Thus,

Solving for and multiplying by the resistance factor, (unrelated to , the angle of twist):
(9) 
Eq. 9 is the elastic LTB moment capacity. This is the critical value of moment that causes LTB. If a moment, , less than this critical value is applied to the beam, the beam will bend perfectly in the yz-plane. This derivation was a stability problem, analogous to a column under compression that will remain perfectly straight unless the critical buckling force is applied. Eq. 9 is our desired result, and is applicable for beams that are slender.
Note that “” in eq. 9 is the unbraced length of the beam, and is usually denoted  . Also, note that constant moment has been assumed along .
. Also, note that constant moment has been assumed along .
The yield moment of the beam can be taken as  , where the “
, where the “ ” accounts for residual stresses from the heating and cooling when the I-shape is formed. Substituting this value of yield moment for
” accounts for residual stresses from the heating and cooling when the I-shape is formed. Substituting this value of yield moment for  in eq. 9, and solving for “” would give us a special value, called “
in eq. 9, and solving for “” would give us a special value, called “ .”
.”
It could then be said that elastic LTB is the limit state of the beam if  . The building code formulas for and
. The building code formulas for and  are slightly different. In the building code equations, “” is eliminated by assuming some average value, and a new variable, “
are slightly different. In the building code equations, “” is eliminated by assuming some average value, and a new variable, “ ” is introduced.
” is introduced.
LTB BUILDING CODE FORMULAS

(10) 
Eq. 10 is applicable for slender beams, where the limit state is elastic LTB. Eq. 10 is the building code’s equivalent to eq. 9, which we derived.
In eq. 10,  (
( if the moment along is constant).
if the moment along is constant).
The following Table compares eq. 9 [theoretical] to eq. 10 [code] for some slender beams, where “” was taken to be  in eq. 9.
in eq. 9.
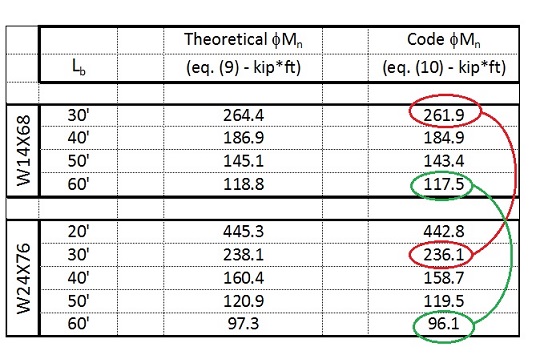
The above table may seem a bit counter-intuitive. The W24X76 is the larger beam, compared to the W14X68. The  and
and  values for the W24X76 are much larger than the corresponding values for the W14X68. Thus, the
values for the W24X76 are much larger than the corresponding values for the W14X68. Thus, the  and
and  values (yield moment and plastic moment, respectively) are much larger for the W24X76, compared to the W14X68. At the lengths, , provided in the Table, however, the beams are reaching their moment capacity prior to reaching . These beams are quite long and slender.
values (yield moment and plastic moment, respectively) are much larger for the W24X76, compared to the W14X68. At the lengths, , provided in the Table, however, the beams are reaching their moment capacity prior to reaching . These beams are quite long and slender.
Indeed, noting the circled pairs in the above Table, we can see that the elastic LTB strengths are actually LOWER for the W24X76, compared to the W14X68. Since elastic LTB is a failure mode dominated by combined weak axis bending and torsion, the W24 is weaker than the W14, since the W24 is the deeper beam but not any wider than the W14 (the W24 has a larger “ ” and a smaller ““).
” and a smaller ““).
Our discussion, up to this point, has considered elastic LTB, which is applicable only for slender beams. The variable  (see eq. 10) was not defined. is defined in Salmon and Johnson section 9.6.
(see eq. 10) was not defined. is defined in Salmon and Johnson section 9.6.
Additionally, beams with a short unbraced length, , will reach prior to failure. Beams with a very short will reach the plastic moment, , which is our ideal limit state. These important topics can be found in Salmon and Johnson section 9.5 and 9.6.
- C. G. Salmon and J. E. Johnson, Steel Structures: Design and Behavior, 5th ed., New York, NY: Prentice Hall, 2008.
[Bibtex]@BOOK{Salmon, Address = {New York, NY}, Author = {Charles G. Salmon and John E. Johnson}, Edition = {5th}, Publisher = {Prentice Hall}, Title = {Steel Structures: Design and Behavior}, Year = {2008} }