
In hypoelasticity, we took the Cauchy stress,  , and developed a constitutive relationship with the Left-Cauchy Green Strain Tensor,
, and developed a constitutive relationship with the Left-Cauchy Green Strain Tensor,  . This relationship was quite complicated (eq. 9 in Section 6: Hyperelasticity). Recall also that these tensors were both defined in spatial coordinates, by definition. Then, we derived an even more complicated “hypoelastic” formula (eq. 7 in Section 7: Hypoelasticity) that involved the rate of deformation tensor,
. This relationship was quite complicated (eq. 9 in Section 6: Hyperelasticity). Recall also that these tensors were both defined in spatial coordinates, by definition. Then, we derived an even more complicated “hypoelastic” formula (eq. 7 in Section 7: Hypoelasticity) that involved the rate of deformation tensor,  . Lastly, a simple three-line pseudo-algorithm was given to illustrate how actual FEA (“solid” element) codes handle such “rate-form” constitutive expressions to solve, say, transient dynamic problems involving one or more bodies. We saw that this algorithm works equally nicely for linear infinitesimal elasticity as well.
. Lastly, a simple three-line pseudo-algorithm was given to illustrate how actual FEA (“solid” element) codes handle such “rate-form” constitutive expressions to solve, say, transient dynamic problems involving one or more bodies. We saw that this algorithm works equally nicely for linear infinitesimal elasticity as well.
In terms of both the non-rate form of the constitutive relationship and the rate-form, linear infinitesimal elasticity simplifies things considerably. Recall that the Second Piola Kirchhoff Stress Tensor,  , can be used for infinitesimal elasticity (review the example at the end of Section 4: Alternative Measures of Stress). Since is defined in material coordinates, we will develop a constitutive relationship with a strain tensor that is similarly invariant to rigid body rotation, viz.,
, can be used for infinitesimal elasticity (review the example at the end of Section 4: Alternative Measures of Stress). Since is defined in material coordinates, we will develop a constitutive relationship with a strain tensor that is similarly invariant to rigid body rotation, viz.,  .
.
Some authors instead choose to use the Cauchy stress and the Eulerian strain for the formulation of their linear infinitesimal constitutive expression. We are free to choose either stress-strain pair ( or
or  ) in linear infinitesimal elasticity. We saw previously that our “time-stepping algorithm” was independent of this choice.
) in linear infinitesimal elasticity. We saw previously that our “time-stepping algorithm” was independent of this choice.
In this chapter we’ll take a look only at linear infinitesimal elasticity. If a material is subjected to large strain (even if it is linear) or if a material is nonlinear (even if subjected to small strain), then it should be treated using the approaches developed in the previous chapters on hyperelasticity and hypoelasticity. Just as in our chapter on hyperelasticity, the focus here will be on developing a non-rate constitutive expression that relates stress and strain. In the elastic regime, a wide variety of materials, including most metals, behave linearly.
The theory of linear infinitesimal elasticity was developed independent of hyperelastic theory, with the former being mostly developed, originally, from intuition and experience [Malvern]. Nevertheless, the linear theory can be derived as well, using the same starting assumptions that we used at in the previous hyperelasticity derivation.
Recall 
Infinitesimal elasticity  ,
, 
note: The linear infinitesimal stress will be denoted by for the remainder of this chapter. So long as  and are work conjugate, we can proceed in deriving our constitutive relationship.
and are work conjugate, we can proceed in deriving our constitutive relationship.
We know the following three expressions to be true as well:


 (still,
(still,  )
)
In index notation, 
For linear materials, we can define  , using a Taylor expansion, as follows:
, using a Taylor expansion, as follows:

note: This is a taylor series with higher terms neglected
So, 
(1) 
note: In eq. 1, 

If there is no initial stress:
(2) 
Note that the order  or
or  doesn’t matter
doesn’t matter
(3) 
 Eq.
Eq. 
 has
has  potential terms (
potential terms ( x matrix) to begin with.
x matrix) to begin with.
Symmetry:  and
and 
 36 terms (6 x 6 matrix)
36 terms (6 x 6 matrix)
Symmetry in 
 (i.e. eq. 3 above)
(i.e. eq. 3 above)
21 constants (general anisotropic)
A plane of symmetry is defined as follows: for every pair of coordinate systems that are mirror images of each other about the plane of symmetry, the elastic constants are the same. A single plane of symmetry reduces the number of independent constants to 13. Orthotropic symmetry (three orthogonal planes of symmetry) reduces the number of independent constants to 9. The proof can be found in [Malvern].
Isotropic only 2 independent constants
Proof:
Recall  (valid outside of isotropy)
(valid outside of isotropy)
note: Since is a function of strain only, path dependence is not considered (i.e. we are still only considering elasticity)
Also note: is quadratic
For isotropy: 
 recall that for hyperelastic isotropy,
recall that for hyperelastic isotropy, 

Let’s assume  , using the following reasoning:
, using the following reasoning:
We know that is quadratic. Thus, doesn’t depend on  , since is cubic (
, since is cubic ( ).
).  is linear and so is, accordingly, squared, in order to obtain a quadratic. Our resulting
is linear and so is, accordingly, squared, in order to obtain a quadratic. Our resulting  term is also multiplied by a coefficient,
term is also multiplied by a coefficient,  .
.  is, similarly, multiplied by a constant,
is, similarly, multiplied by a constant,  .
.
Recall that  and
and  is a function of both
is a function of both  and
and  .
.
Also recall that  , since is a symmetric tensor.
, since is a symmetric tensor.

![\frac{d\phi}{d\epsilon_{mn}}=a[\epsilon_{ii}\frac{d\epsilon_{jj}}{d\epsilon_{mn}}+\epsilon_{jj}\frac{d\epsilon_{ii}}{d\epsilon_{mn}}]+2b[\frac{d\epsilon_{ij}}{d\epsilon_{mn}}\epsilon_{ij}]](https://utsv.net/wp-content/ql-cache/quicklatex.com-2ede51ce1eb79713d0dcef2f13d0df2a_l3.png "Rendered by QuickLaTeX.com")
![=a[\epsilon_{ii}\underbrace{\delta_{jm}\delta_{jn}}_{*}+\epsilon_{jj}\underbrace{\delta_{im}\delta_{in}}_{*}]+2b[\delta_{im}\delta_{jn}\epsilon_{mn}]](https://utsv.net/wp-content/ql-cache/quicklatex.com-77e3f51fa6fc5fd2d261067542109552_l3.png "Rendered by QuickLaTeX.com")
* – note that “ ” must equal “
” must equal “ ” in the expression that is multiplied by “” in order to be non-zero.
” in the expression that is multiplied by “” in order to be non-zero.
So, 
 “
“ ”
”
 “
“ ”
”
Recall :
(4) 
In eq. 4, and are  elastic constants. We can see that we have two independent constants, as expected. These constants are determined experimentally, as will be discussed shortly.
elastic constants. We can see that we have two independent constants, as expected. These constants are determined experimentally, as will be discussed shortly.
The following alternative expression is commonly found in literature on FEA:
(5) 
We will see later what  is, as well as why we use the “
is, as well as why we use the “ ” operator.
” operator.

note: is symmetric in matrix form
Also note: The shear terms are multiplied by “2” because we used symmetry of to reduce the 9 x 9 tensor, , to a 6 x 6.
The matrix “” can be written in “Voigt” notation, “ ” as well:
” as well:

Using Voigt notation, we can construct the following table:
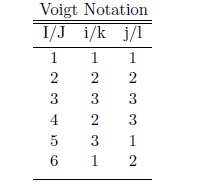
The above table can be simplified in this way due to the symmetries of the tensor apparent upon inspection.
e.g. the way you read the  row depends on what information you need:
row depends on what information you need:
when I = 1, i = 1, j = 1
when J = 1, k = 1, l =1
This is easily confirmed by comparing, say, the “1-1” term in each of the above two matrices.
(6) 
i.e.


note: Eq. 6 is how stiffness matrices are formed in FEA
Sometimes we like to write the constitutive equation in the manner shown in eq. 5. We can prove that this expression is true by noting that the “:” operator is essentially two dot products (it can be easily shown that our previous definition of : for second order tensors still holds true as well).
![\boldsymbol{\sigma}=\underbrace{[\lambda \delta_{ij} \delta_{kl} +\mu (\delta_{ik} \delta_{jl} + \delta_{il} \delta_{jk})]\mathbf{e_i} \otimes \mathbf{e_j} \otimes \mathbf{e_k \otimes e_l}}_{\text{can be thought of as a 9x9 matrix}} : \epsilon_{mn}\mathbf{e_m \otimes e_n}](https://utsv.net/wp-content/ql-cache/quicklatex.com-63d2441b28592cfcac5b09e96fbf1e75_l3.png "Rendered by QuickLaTeX.com")
![=[\lambda \delta_{ij} \delta_{mn} +\mu (\delta_{im} \delta_{jn} + \delta_{in} \delta_{jm})]\epsilon_{mn}\mathbf{e_i} \otimes \mathbf{e_j}](https://utsv.net/wp-content/ql-cache/quicklatex.com-558bc78789397b66c43d15292e24f440_l3.png "Rendered by QuickLaTeX.com")
![=[\lambda \delta_{ij} \epsilon_{mm} + 2 \mu \epsilon_{ij}]\mathbf{e_i \otimes e_j}](https://utsv.net/wp-content/ql-cache/quicklatex.com-051c362034f6c800c46a49c096a3c0a7_l3.png "Rendered by QuickLaTeX.com") , which is as expected.
, which is as expected.
note: symmetry of  was invoked in the last step of the derivation
was invoked in the last step of the derivation
- L. E. Malvern, Introduction to the Mechanics of a Continuous Medium , Upper Saddle River, NJ: Prentice-Hall, Inc. , 1969 .
[Bibtex]@Book{Malvern, author = { Malvern, Lawrence. E. }, title = { Introduction to the Mechanics of a Continuous Medium }, isbn = { }, publisher = { Prentice-Hall, Inc. }, year = { 1969 }, address = {Upper Saddle River, NJ}, }